



Real-time Anticipation of Occlusion for Automated Camera Control in Toric Space
Abstract: Efficient visibility computation is a prominent requirement when designing automated camera control techniques for dynamic 3D environments; computer games, interactive storytelling or 3D media applications all need to track 3D entities while ensuring their visibility and delivering a smooth cinematic experience.
Addressing this problem requires to sample a large set of potential camera positions and estimate visibility for each of them, which in practice is intractable despite the efficiency of ray-casting techniques on recent platforms.
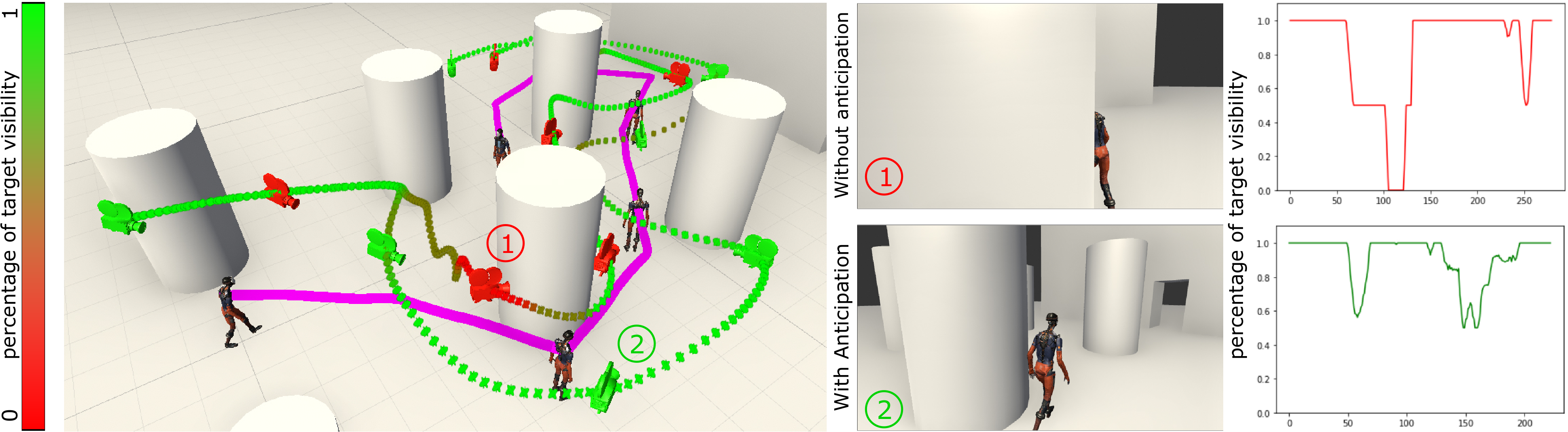
In this work, we introduce a novel GPU-rendering technique to efficiently compute occlusions of tracked targets in Toric Space coordinates — a parametric space designed for cinematic camera control. We then rely on this occlusion evaluation to derive an anticipation map predicting occlusions for a continuous set of cameras over a user-defined time window. We finally design a camera motion strategy exploiting this anticipation map to minimize the occlusions of tracked entities over time.
The key features of our approach are demonstrated through comparison with traditionally used ray-casting on benchmark scenes, and through an integration in multiple game-like 3D scenes with heavy, sparse and dense occluders.
Authors: Ludovic BURG, Christophe LINO, Marc CHRISTIE
Results videos
Bechmark scenes with our system:







Bechmark scenes with our system without anticipation:
Bechmark scenes with Raycast visibility estimation without anticipation:
Cut exemple:
Cut and mask: