



Title: Directing Cinematographic Drones
Abstract: Quadrotor drones equipped with high quality cameras have rapidely raised as novel, cheap and stable devices for filmmakers. While professional drone pilots can create aesthetically pleasing videos in short time, the smooth – and cinematographic – control of a camera drone remains challenging for most users, despite recent tools that either automate part of the process or enable the manual design of waypoints to create drone trajectories.
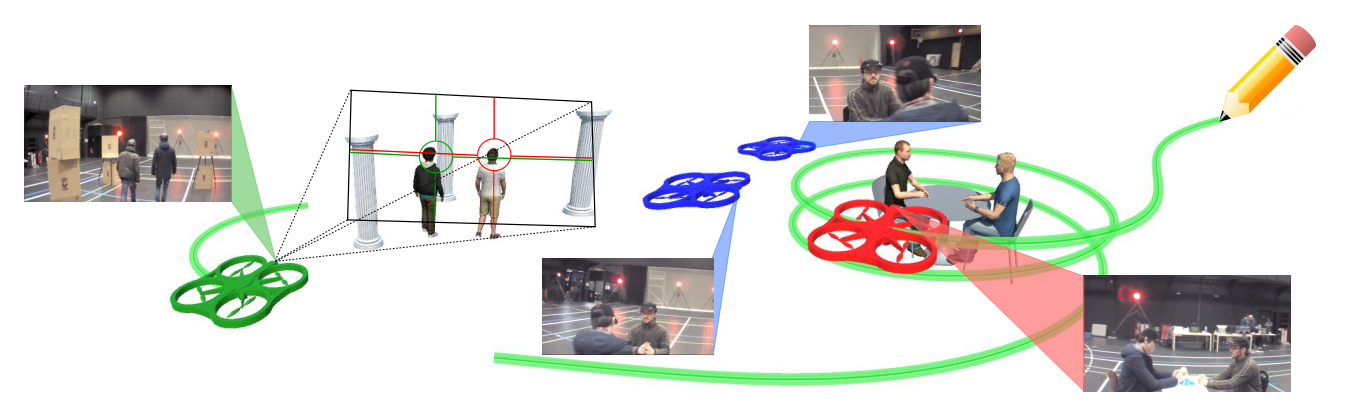
This paper proposes to move a step further towards more accessible cinematographic drones by designing techniques to automatically or interactively plan quadrotor drone motions in 3D dynamic environments that satisfy both cinematographic and physical quadrotor constraints. We first propose the design of a Drone Toric Space as a dedicated camera parameter space with embedded constraints and derive some intuitive on-screen viewpoint manipulators. Second, we propose a specific path planning technique which ensures both that cinematographic properties can be enforced along the path, and that the path is physically feasible by a quadrotor drone. At last, we build on the Drone Toric Space and the specific path planning technique to coordinate the motion of multiple drones around dynamic targets. A number of results then demonstrate the interactive and automated capacities of our approaches on a number of use-cases.